Rotordinamik analizleri, gaz türbinleri başta olmak üzere tüm döner makineler için oldukça önemlidir. Dönme hareketi, yapıların dinamik karakteristiğini etkilemektedir. Bu noktada teorik olarak geliştirilen rotordinamik analiz yeteneklerinin oldukça yüksek ve kapsayıcı olduğu bilinmektedir. Dinamik analizlere dönme hareketinin etkilerinin de eklenmesiyle rotordinamik analizleri gerçekleştirilebilmektedir. Rotordinamik çalışmaları, sonlu elemanlar yöntemiyle yapıldığında analiz yeteneği oldukça geniş olduğundan bu alanda ürün geliştiren birçok öncü firma tarafından yeğlenmektedir. FEM düzleminde rotorların ve statorların davranışları ve çevresel etkilere karşı yanıtları net olarak temsil edilebilmektedir. Bu yazıda, rotordinamik analizlerinin teorisi, sonlu elemanlar düzleminde rotordinamik analiz uygulamaları ve MSC Nastran’ın2 temel rotordinamik yeteneği ve uygulamaları anlatılmaktadır.
2. ROTORDİNAMİK ANALİZLERİNİN ÖNEMİ VE YERİ
Rotordinamik analizleri, mühendislikte döner makinaların tasarımı ve performansının değerlendirilmesinde büyük önem taşır. Bu analizler, genellikle büyük türbinler, kompresörler, motorlar gibi döner makinaların tasarımında ve işletme koşullarının en iyilenmesinde kullanılır.
Bu analizlerin temel amacı, döner sistemlerdeki titreşimleri, dengesizlikleri ve titreşim etkisiyle genlik artışını anlamak ve denetim altına almak olarak özetlenebilir. Özellikle rotorların dinamik davranışlarının incelenmesi, sistemlerin güvenliği, dayanıklılığı ve verimliliği üzerinde doğrudan etki eder.
Ayrıca rulman seçimi, yerleştirilmesi ve yağlama sistemlerinin en iyilenmesi gibi konularda da rotordinamik analizlerinin büyük önemi vardır. Doğru rulman seçimi ve sürtünme denetimi, makinaların uzun ömürlü olabilmesi için zorunludur. Rotordinamik analizleri, mühendislik uygulamalarında vazgeçilmez bir araç olarak kabul edilir. Bu analizler, sonlu elemanlar analizi gibi diğer mühendislik uygulamalarıyla birlikte kullanılarak, ayrıntılı ve güvenilir mühendislik çözümleri sunar.
Şekil 1. Turbofan Uçak Motoru
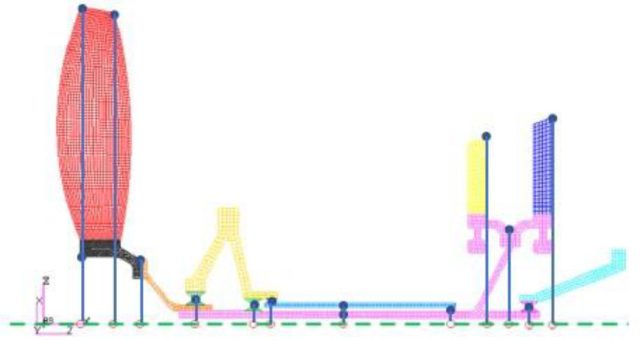
Şekil 2. Uçak Motoru Sonlu Elemanlar Modeli Örneği
Rotordinamik analizlerinin sonlu elemanlar yöntemiyle uygulanması, karmaşık döner sistemlerin dinamik davranışlarını ayrıntılı bir şekilde incelemek için etkili bir yöntem sunmaktadır (Şekil 2). Sonlu elemanlar yöntemi, bir yapının geometrisini, malzeme özelliklerini, yük ve sınır koşullarını matematiksel olarak modellemek için kullanılır. Bu yöntemin, büyük ve karmaşık sistemlerin analizinde çok geniş bir kullanım alanı vardır. Rotordinamik çalışmalarında sonlu elemanlar analizi yapılarak, statik ve dinamik yüklerin nasıl oluşturulduğu ve yapının nasıl etkilendiği ayrıntılı olarak modellenebilmektedir.
Ayrıca sonlu elemanlar yöntemi, bir yapı veya sistem üzerindeki her noktada ve her anki durumda gerçekleşen kuvvetlerin, momentlerin ve biçim değişikliklerinin hesaplanmasına olanak tanır. Bu nedenle döner sistemlerin dinamik karakteristiğinin modellenmesi için ideal bir temel oluşturur.
Örneğin, bir türbin rotorunun sonlu elemanlar modeli ile, rotorun dengesizlikler ve dinamik yükler altında nasıl hareket edeceğini tahmin edebilir. Bu modellemeler sayesinde, rotorun titreşim karakteristikleri analiz edilebilir ve gerektiğinde tasarım değişiklikleri yapılabilir.
Sonuç olarak, rotordinamik analizlerinin sonlu elemanlar yöntemiyle irdelenmesi, karmaşık döner sistemlerin daha ayrıntılı ve güvenilir bir şekilde analiz edilmesini sağlar. Bu yaklaşım, mühendislik uygulamalarında döner sistemlerin tasarımı, en iyilenmesi ve bakımı için önemli bir araçtır ve endüstriyel uygulamalarda yaygın olarak kullanılmaktadır.
3. ROTORDİNAMİK ANALİZLERİNE GENEL BAKIŞ
3.1 Rotordinamiğin Temelleri
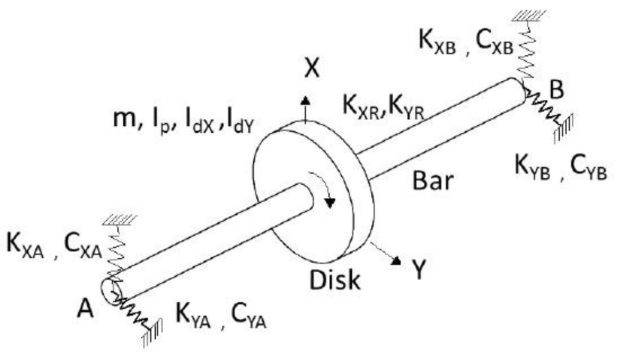
Rotordinamik kavramlarının çoğu, basitleştirilmiş bir Jeffcott rotoru kullanılarak açıklanabilmektedir [1]. Şekil 3’te gösterilen rotor modeli A ve B uçlarından yaylara ve sönümleyicilere bağlı kütlesiz bir şaft içermektedir. Şaft, uzunluğu yönünde konumlandırılmış Z ekseninde dönmektedir. X ve Y eksenleri yanal bükülme yönlerini temsil etmektedir. Şaftın ortasında belirli bir kütleye ve eylemsizliğe sahip bir disk bulunmaktadır. Dönen şaftın uç kısımları, doğrusal yaylar ve sönümleyiciler kullanarak modellenen rulmanlar ile desteklenmiştir.
Şekil 3. Jeffcott Rotoru
KXR ve KYR
Barın X ve Y yönlerinde bükülme katılığı.
KXA ve KYA
Rulmanın A ucunda X ve Y yönlerinde bükülme katılığı.
KXB ve KYB
Rulmanın B ucunda X ve Y yönlerinde bükülme katılığı.
CXA ve CYA
A ucundaki yatağın X ve Y yönlerinde sönümleme katsayıları.
CXB ve CYB
B ucundaki yatağın sırasıyla X ve Y yönlerinde sönümleme katsayıları.
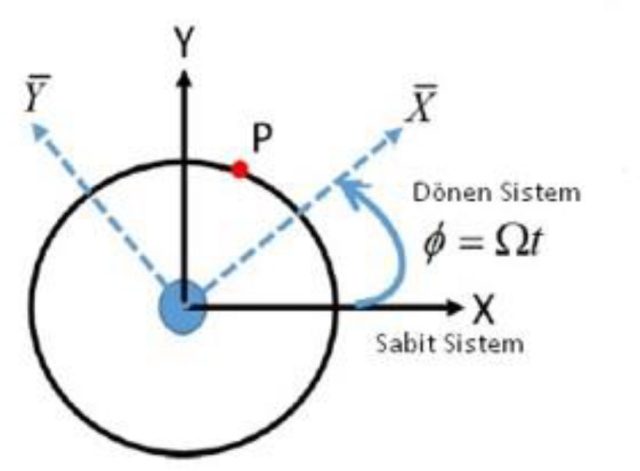
Bir rotordinamik problemi sabit bir referans sistemiyle veya dönen bir koordinatla tanımlanmış bir referans sistemiyle analiz edilebilmektedir. Rotor ve statordaki var olan simetriye bağlı olarak, zamandan bağımsız hareket eşitliklerinin elde edilmesi amacıyla analiz için uygun bir referans sistemi seçilebilir. Rotor, yataklar ve destek yapısı asimetri içerdiğinde ortaya çıkan eşitlikler, analiz için kullanılan referans sisteminden bağımsız olarak zamana bağlı değişkenler içerir.
Şekil 4. Dönen ve Sabit Referans Sistemleri
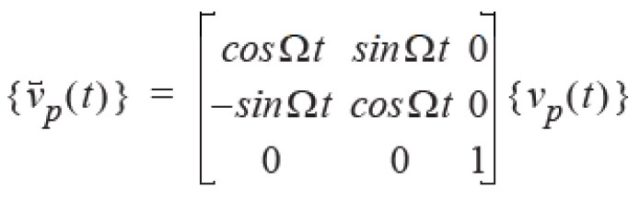
Aynı orijinli sabit bir referans sitemi ile dönen bir referans sistemi (rad/sn) arasındaki dönüşüm şu şekilde yazılabilir:
(Eşitlik 1)
: Zamana bağlı bir vektörün dönen koordinat sistemindeki tanımı.
: Dönen ve sabit sistemler arasındaki zamana bağlı dönüşüm matrisi.
: Zamana bağlı bir vektörün sabit koordinat sistemindeki tanımı.
Sabit koordinat sisteminden döner koordinat sistemine dönüşüm şu şekilde verilmiştir:
(Eşitlik 2)
Sabit bir referans sistemi ile dönen bir referans sitemi arasındaki temel fark Tablo 2’de verilmiştir:
Tablo 2. Sabit ve Dönen Referans Sistemleri Farkı
Sabit Sistemin Analizi
Döner Sistemin Analizi
Yapının dönen kısmı dönme eksenine göre eksenel simetrik olmalıdır.
Dönen yapının dönme eksenine göre eksenel simetrik olması gerekmez.
Analiz modelinde dönen yapı sabit bir yapıya bağlanabilir.
Analize yalnızca simetrik dönmeyen yapı katılmıştır.
Farklı dönme eksenleri etrafında farklı dönme hızlarında dönen birden fazla yapıyı destekler.
Yalnızca tek bir dönen yapıyı destekler.
Rotor kritik hızlarını hesaplamak amacıyla Campbell diyagramları oluşturmak için kullanılabilir.
Campbell diyagramları kritik hızların hesaplanmasında doğrudan uygulanamaz.
3.3 Rotor Simetrisi
Analiz için modelleme ortamı oluştururken, sabit veya dönen bir referans sistemi seçilmesinde, rotorun ve rotor destek yapısının simetrik olup olmaması çok önemlidir. Aşağıdaki şartlar sağlandığında rotorun simetrik olduğu anlaşılır. [1]
KXR = KYR
IdX = IdY
Statorun simetrisi ise aşağıdaki şartların karşılanması ile sağlanır.
KXA = KYA
CXA = CYA
KXB = KYB
CXB = CYB
Zamandan bağımsız bir kütle, katılık ve sönümleme matrisleriyle çalışmak için aşağıdaki koşulların sağlanması zaruridir.
Tablo 3. Simetri ve Analiz Sistemi Arasındaki İlişki
Referans Durum
Rotor Simetrisi
Stator Simetrisi
Analiz Sistemi
Durum 1
Simetrik
Simetrik
Dönen/Sabit
Durum 2
Simetrik
Asimetrik
Sabit
Durum 3
Asimetrik
Simetrik
Dönen
Durum 4
Asimetrik
Asimetrik
Uygulanamaz
Tablo 3, zamandan bağımsız eşitlik sistemi elde etmek amacıyla rotor ve statordaki simetriye bağlı olarak kullanılabilecek referans sistemi seçilimi için bir özet sunmaktadır. Durum 1’de modelin hem rotor hem de stator kısmı simetriktir ve analiz herhangi bir referans sisteminde gerçekleştirilebilir. Rotor simetrik ve destekleyici yapı asimetrik ise analiz yalnızca sabit referans sisteminde gerçekleştirilebilir. Rotorun asimetrik ve statorun simetrik olması durumunda analiz yalnızca dönen referans sisteminde yapılabilir. Ve son olarak hem rotor hem de stator asimetrik ise zamandan bağımsız eşitlik sisteminin elde edilmesi olanaksızdır.
3.4. Rotor Dengesizliği
Rotor dengesizliği, rotorun titreşimini oluşturan en önemli nedenlerden biridir. Rotorun kütle merkez çizgisi dönme ekseni ile çakışmadığında kütlenin ataletinden kaynaklanan dönel kuvvetler ortaya çıkar. Bu kuvvetler, rotorla birlikte döndüğü ve dönme eksenine dik olarak yönlendirildiği için, dengesizlik yanal titreşim modunda etki eder. Dönme hızı arttıkça, daha büyük merkezcil kuvvetler oluşmaktadır. Titreşim tepkisinin frekansı, tahrik kuvvetinin frekansına karşılık gelmektedir ve dengesizlik tepkisinin frekansı dönüş hızıyla aynı olacaktır. Üretim hatası, ısıl biçim değişikliği, malzeme heterojenliği, aşınma ve korozyon gibi çeşitli nedenlerden, artık dengesizlik oluşabilir. Montajdaki toleransın birikmesi nedeniyle de dengesizlik meydana gelebilmektedir. [3]
3.5 Rotor Savrulması
Bir rotorun sahip olduğu düzlemden farklı bir düzleme hareket etme olgusuna savrulma adı verilir. Rotorların savrulma hareketini anlamak, dönen makinaların fiziğinin derinlemesine anlaşılması için çok önemlidir. Teorik olarak ele alınan basit bir model, gerçek dünyada gözlemlenen pratik rotor problemlerine doğrudan uygulanabilir ve basit modelin hareket eşitlikleri kolaylıkla anlaşılabilir.
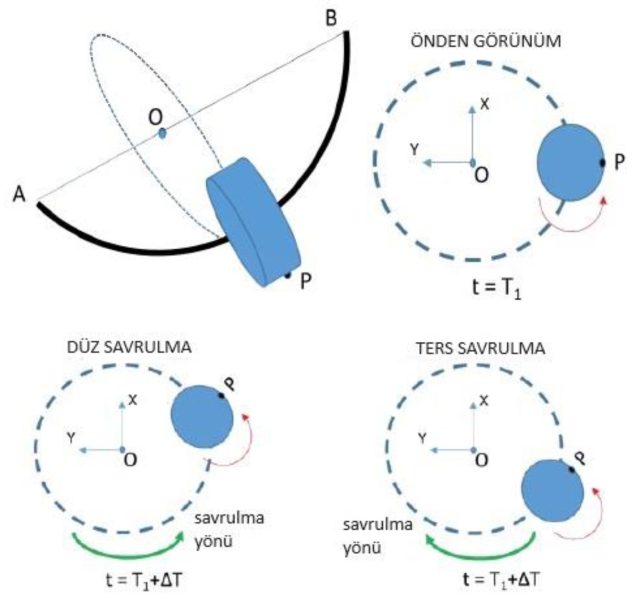
Örnek bir analiz olarak, en basit rotor modeli olan ve Şekil 3’te gösterilen Jeffcott rotoru düşünülebilir. Jeffcott rotor modelinin, bir savrulma yörüngesi oluşturularak her iki yönde (dikey ve yatay) aynı anda titremesine izin verildiğinde; savrulma hareketi yapan Jeffcott rotoru Şekil 5’te gösterilen örnekte bir yörüngede olacaktır. Rotor modelinin önden görünümünde disk çevresinde bir referans noktası P’nin vurgulandığı şekilde gösterilmiştir.
Şekil 5. Rotor Savrulması Hareketleri
Rotor diski düzeneği saat yönünün tersi yönünde sabit bir açısal hızla dönmektedir. Uygulanan kuvvete bağlı olarak iki farklı savrulma modu olasıdır; bunlar düz ve ters savrulmadır. Şekil 5’te gösterildiği gibi düz yönde savrulma hareketi durumunda, rotor düzeneği uygulanan açısal hızla aynı yönde döner. Ters savrulma hareketi durumunda ise, rotorun dönme yönü uygulanan açısal hızın tersi yöndedir. [1]
3.6 Kararlılık
Savrulma frekansları rotor kararlılığının belirlenmesinde önemlidir. Savrulma hareketi dönme hızında olmasa da savrulma modları rotor sönümlemesinden veya yatak ve contalardan kaynaklanan dış kuvvetler nedeniyle kararsız olabilir. Savrulma modlarının kararlılığını kestirmek, bir sistemin sorunsuz çalışmasını sağlamak için önemlidir.
Sistemin özdeğerleri şu şekilde karmaşık eşlenik çiftler halinde görünür:
p=α±ⅈω (Eşitlik 3)
Eşitlik 3’te gösterilen ω sönümlü doğal frekansı, α ise mod tepkisinin artma veya azalma hızını temsil etmektedir.
Her özdeğere karşılık gelen bir özvektör veya mod şekli hesaplanabilir. Mod şekilleri ayrıca karmaşık eşlenik çiftlerde de görünür. Her karmaşık mod, karşılık gelen savrulma frekansındaki rotor deformasyonunu temsil eden, zamana bağlı bir eğriyi temsil eder.
Sistem kararlılığı, tüm özdeğerlerin negatif gerçek kısımlara sahip olup olmadığının kontrolü ile araştırılır. Rotor modelindeki rotor dönüş hızı veya yataklardan birindeki sönümleme katsayısı gibi bazı parametreleri değiştirerek ve farklı değişken değerlerinde özdeğerleri hesaplayarak kararlılık analizi gerçekleştirilebilmektedir.
3.7 Eş Zamanlı Olmayan (Asenkron) ve Eş Zamanlı (Senkron) Analiz
Belirlenen hızlarda dönen rotorlardaki tepkinin hesaplanması, asenkron analiz uygulanarak gerçekleştirilir. Kullanıcı rotor hızlarını belirler, jiroskopik terimlerin değerleri hesaplanarak hareket eşitliğine eklenir ve tepki belirlenir.
Referans rotorla senkron olan tahrik ile frekans tepkisinin hesaplanması, senkron analiz uygulanarak gerçekleştirilir. Rotor hız aralığı belirlenir, her frekans için jiroskopik terimlerin değerleri hesaplanarak hareket eşitliğine eklenir ve tepki belirlenir. Eğer karmaşık özdeğer analizi “senkron” olarak yapılırsa, modelin kritik frekansları çıktı olarak elde edilir.
3.8 Campbell Diyagramı
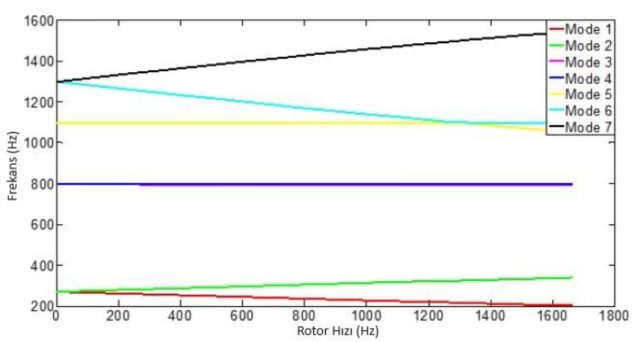
Savrulma frekansları analizi, girdi olarak belirtilen dönme hızlarında hesaplanır. Tipik olarak karmaşık veya modal karmaşık özdeğer çözümlerinde farklı rotor hızlarında bir dizi analiz gerçekleştirilir. Şekil 6’da gösterildiği gibi savrulma frekanslarını rotorun dönme hızına göre çizmek yaygın bir uygulamadır. Bu çizime Campbell diyagramı denir. Farklı rotor hızlarında her mod için savrulma frekansları, doğal frekans eğrilerini temsil eden bir dizi çizgi meydana getirecek şekilde oluşturulur. [1]
Şekil 6. Campbell Diyagramı Örneği
3.9 Mod İzlenmesi
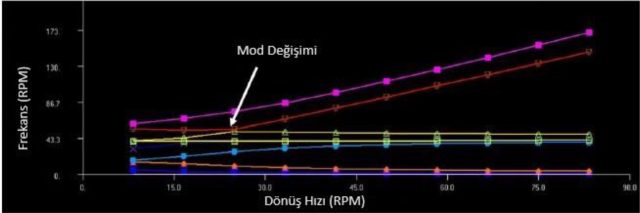
Şekil 7. Takip Edilmeyen Mod Grafiği Örneği
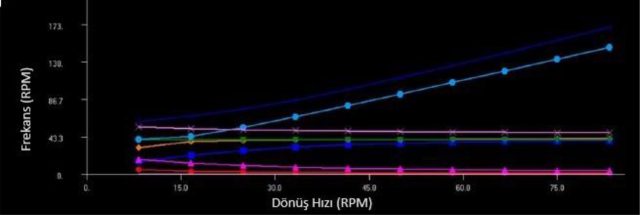
Campbell diyagramı çizimi için, Şekil 7’de gösterildiği gibi, iki modun rotor hızına bağlı olarak sıra değiştirebildiği sıklıkla gözlemlenir. Bu durum, daha yüksek rotor hızlarındaki modları analiz ederken karışıklığa yol açabilir. Bu durumu önlemek için her bir doğal frekans için mod şeklini izleyen bir mod izleme algoritmasına gerek vardır. Mod izleme algoritması kullanıldıktan sonra elde edilen sonuçlar Şekil 8’de gösterilmektedir. Mod izleme algoritmalarının çoğu ortogonalite (geometrik diklik) koşullarını kullanır.
Şekil 8. Takip Edilen Mod Grafiği Örneği
3.10 Kritik Hız
Kritik hızlar genellikle rotor dengesizliğinden kaynaklanan titreşimin bölgesel olarak en yüksek olduğu dönme hızları olarak tanımlanır. Rotor dengesizliği her zaman senkronize bir savrulma hareketi ürettiğinden, senkronize titreşimin büyük genlikleri genellikle bir rotor dengesizliği sorununa işaret eder. Ancak kritik hızlardaki dengesizlik tepkilerinin tümü tehlikeli değildir.
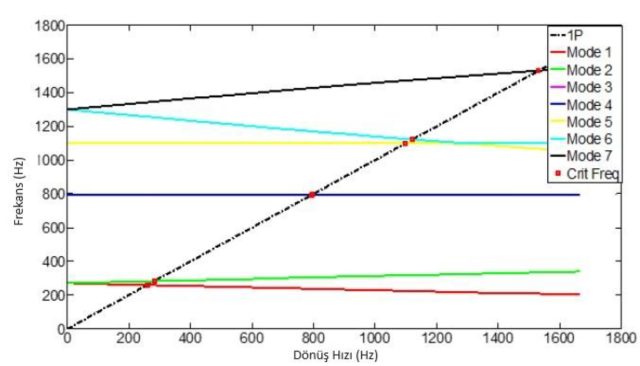
Şekil 9. Kritik Hız Grafiği Örneği
Şekil 9’da gösterildiği gibi rotor kritik hızlarını belirlemek için Campbell diyagramları kullanılabilir. Bir rotor sisteminin kritik hızı, dönme hızının katları sistemin doğal frekanslarından biriyle çakıştığında sistemin dönme hızı olarak tanımlanabilir. Dengesizlikten kaynaklanan uyarım genellikle eşzamanlıdır; yani rotorun dönme hızı doğal frekanslardan birine eşittir. Kritik hızları belirlemeye yönelik bir yaklaşım, basit bir şekilde Campbell diyagramını oluşturmak, ilgilenilen tüm tahrik frekansı hatlarını katmak ve bu tahrikle ilişkili kritik hızı tanımlamak için uyarım çizgisi ile doğal frekans eğrileri arasındaki kesişimi grafiksel olarak bulmaktır. [3]
4. SONLU ELEMANLAR YÖNTEMİ VE ROTORDİNAMİK ANALİZLERİ
Rotordinamik analiz yeteneği, dönen bileşenli yapıların tasarım ve analizini gerçekleştirmek için kullanıcılara göreceli basit bir bakış açısı sunmaktadır. Analiz yöntemleri, temel gereksinimlerin karşılandığından emin olmak için birçok rotor üreticisinden alınan geri bildirimlerle geliştirilmiştir. MSC Nastran’daki rotordinamik yetenekler, frekans cevap analizini, karmaşık modları, statik ve geçici tepki analizlerini kapsamaktadır.
Frekans cevap analizleri, rotorların kullanıcı tarafından belirlenen hızlarda döndüğü durumda veya referans rotorla senkron bir tahrik verildiği durumda rotor/mesnet yanıtını gösterir. Asenkron analiz, sistemin rotor hızından bağımsız dış bir uyarana verdiği yanıtı sunar. Senkron hesaplama ise rotor dengesizliği veya rotor dönüş hızına bağlı diğer tahriklere karşı sistem yanıtını belirler.
Karmaşık mod analizleri, rotorların belirli hızlarda döndüğü durumlarda savrulma frekanslarını ve kritik hızları belirler. Savrulma modları, rotorların belirli hızlarda döndüğü rotor/mesnet sisteminin modlarıdır. Kritik hızlar, bir rotor dönüş hızına denk gelen savrulma frekanslarıdır. Savrulma frekanslarının hesaplanması asenkron analiz ile yapılırken, kritik hızların hesaplanması senkron analiz ile yapılır.
Statik analiz, örneğin bir uçağın yunuslama veya dönme hareketi nedeniyle rotor üzerinde oluşan yükleri belirler. Çevik manevra yetenekleri tasarım isterlerinin bir parçası olabilir ve statik analiz sonuçlarına göre rotor hareketini kısıtlamak, rotor kanatlarının kaplama iç kısmına sürtünmesini önlemek tasarım gereklilikleri haline gelebilir.
Doğrusal ve doğrusal olmayan geçici tepki analizleri, motor kanatlarının çıkışı ve ardından rüzgâr türbini simülasyonunu sağlayabilmektedir. Bu analiz, uçuş sırasında yapısal bütünlüğü sağlamak ve yüksek titreşim düzeylerinin önüne geçebilmek için kullanılır.
Yapı, sabit referans sisteminde analiz ediliyorsa, modelin dönen kısmı dönüş eksenine göre simetrik olmalıdır. Analiz edilen rotor simetrik değilse, sorun dönen referans sisteminde çözülmelidir. Ancak bu durumda, hareket eşitliklerinin sabit katsayılarla çıkarılabilmesi için dönmeyen kısmın simetrik olması gerekir.
Gelişmiş 3B Rotordinamik yeteneği ile, üç boyutlu (3B) kabuk/katı elemanlar kullanarak 3B rotorları modellemek daha fazla hesaplama süresi gerektirebilir. Ancak özel modelleme kısıtlamaları veya çabaları olmadan tam geometrinin yakalanması çok daha kolaydır. Bu da model hazırlık süresini büyük ölçüde azaltır. 3B modelleme yeteneği ayrıca, yerel deformasyon modlarını yakalayarak model hakkında daha fazla bilgi sağlar. Daha basit, simetrik ve homojen modellerde bir boyutlu (1B) elemanların kullanımı önerilir. Çünkü bunlar hesaplama süresinde önemli üstünlük sağlar. Rotor simetrik olduğunda ve konik/dağıtılmış kesitler içerdiğinde eksenel harmonik elemanların kullanılması önerilir.
Yukarıdaki tüm analizler, rotorların dönüşsel simetriye sahip olduğu varsayımıyla sabit koordinat sisteminde veya statorun dönüşsel simetriye sahip olduğu varsayımıyla dönen koordinat sisteminde gerçekleştirilebilir.
Rotor ve statorlar 1B, 2B veya 3B elemanlarla modellenebilmektedir. 1B elemanlarla (CBAR, CBEAM, CBUSH gibi) modelleme yapıldığı zaman, tüm şaftı temel parçalara kesitler halinde bölme işlemi yapılmaktadır. Kullanılan 1B elemanlarla şaft ve noktasal kütlelerle (CONM2) diskler temsil edilebilir. Bu denli pratik bir yaklaşımda, tasarım üzerine gelen bir güncelleme, 1B elemanların tanımlarında küçük değişiklikler yapılmasıyla sonlu elemanlar modeline aktarılabilmektedir ve böylece basit değişikliklerin etkisi çok hızlı görülebilmektedir.
Şekil 10. 2B Rotor Modeli Örneği
Eğer yapı 2B modellemek isteniyorsa klasik 2B elemanlar (CQUAD4, CQUAD8, CTRIA3, CTRIA6) kullanılamaz. Bu elemanların harmonik sürümleri olan CQUADX ve CTRIAX elemanları kullanılabilir (Tablo 4). Elemanların tanımları için simetrik eksenli bir özellik kartı olan PAXSYMH kartı kullanabilirken, bağlayıcı eklemek için de RBAX3D tipi bağlayıcı kullanılabilir. Bu modelleme yöntemi yapının simetrik eksenli bir yapıda olduğunun varsayımına dayanmaktadır.
Tablo 4. Eleman Tipleri ve Özellikleri
Eleman Tipi
Eleman Boyutu
Eleman Şekli
Düğüm Noktası Sayısı
Kenar Sayısı
CONM2
0B
Nokta
1
0
CBAR
1B
Kiriş
2
1
CBEAM
1B
Kiriş
2
1
CBUSH
1B
Kiriş
2
1
CTRIA3
2B
Üçgen
3
3
CTRIA6
2B
Üçgen
6
3
CTRIAX
2B
Üçgen
3-6
3
CQUAD4
2B
Dörtgen
4
4
CQUAD8
2B
Dörtgen
8
4
CQUADX
2B
Dörtgen
4-8
4
3B modellemede herhangi bir kısıt bulunmamaktadır. Rotor ve statorların en ayrıntılı modelli, 3B elemanlarla yapılabilmektedir. 3B modelleme, analizin sabit veya dönen referans sistemi üzerinden yapılabilme seçeneklerini sunmaktadır.
5.2 Sıkça Kullanılan Modelleme Girdileri
Tablo 5. Rotordinamik Analiz Girdileri
RGYRO
Rotorları analiz senaryolarına çağırmak için kullanılan karttır. Senaryo içerisine eklendiğinde rotordinamik modülü aktif edilmiş olur. Rotorların dönme hızı bu kartla tanımlanabilir.
ROTOR(G)(AX)
Rotor düzleminin tanımlandığı karttır. Bu kart yardımıyla seçilen elemanlar veya düğüm noktaları rotor olarak tanımlanacaktır. ROTOR kartı 3B modeller için, ROTORAX kartı 2B modeller için ve ROTORG kartı 1B modeller için kullanılabilir.
RSPINR
Rotorun dönme davranışının, hangi eksende ve ne hızda döneceğinin frekans düzleminde tanımlandığı karttır. Sabit bir değer atanabilmekle birlikte, bir tabloya bağlı değişken olarak tanımlanabilir.
RSPINT
Rotorun dönme davranışının, hangi eksende ve ne hızda döneceğinin zaman düzleminde tanımlandığı karttır. Sabit bir değer atanabilmekle birlikte, bir tabloya bağlı değişken olarak tanımlanabilir.
Rotordinamik analizlerinde genel olarak karmaşık özdeğer problemi çözülmüş olur. Bu analizin üstüne frekans cevap analizi veya geçici tepki analizi de gerçekleştirilebilir. Her dinamik analizde olduğu gibi sönümleme yaklaşımları çok önemli bir rol oynamaktadır. Senaryolarda aşağıdaki sönümler eklenebilir:
• Modal sönümleme: SDAMP ve TABDMP1 kartları yardımıyla yapının doğal frekanslarından türetilen modal sönümleme değerleri eklenebilmektedir.
• Yapısal sönümleme: Temel olarak yapının deplasmanına bağlı olarak oluşan sönümleme değerleri eklenebilir.
• Viskoz sönümleme: Bir katsayıya bağlı olarak doğrusal veya bir tabloya bağlı olarak doğrusal olmayan bir şekilde tanımlanabilmektedir. CDAMP, CVISC katları yardımıyla viskoz sönümleme oluşturulabilir.
• Rayleigh Sönümleme: Katılık veya kütle matrisinden türetilen bir sönümleme tanımıdır.
• Malzeme Sönümlemesi: Yukarıdaki maddelere ek olarak, malzeme kartları içinde tanımlanan sönümleme katsayılarıyla da sönümleme modellenebilir. [2]
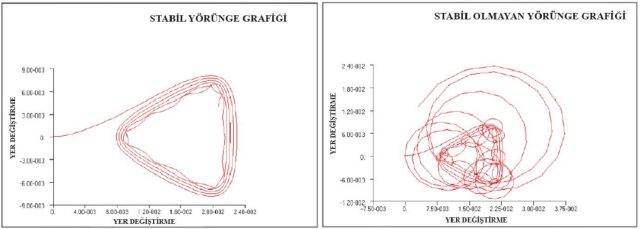
Geçici tepki analizlerinde kararlı (stabil) olan ve olmayan yörüngeler grafik olarak çizdirilip incelenebilmektedir. İncelenmek istenen düzlem oluşturulacak grafiklerin x ve y eksenlerine girilerek yer değiştirme sonuçları görülebilir. Aynı zamanda tüm zaman adımları aynı grafikte gösterilerek sonuçların kararlı olup olmadığı gözlemlenebilir. Aşağıdaki görsellerde stabil olan ve stabil olmayan yörüngelerden birer örnek verilmiştir. Kararlı olmayan yörüngenin devamlı büyüyen davranışı açık bir şekilde görülebilir.
Modelde dönme hızları ve dönme eksenleri farklı birden fazla rotor olabilir. Eğer modelde birden fazla rotor bulunmaktaysa, bu rotorlardan bir tanesi referans rotor olmak zorundadır. Çünkü dönme hızı yalnız referans rotora eklenmektedir. Diğer rotorların dönme hızı ise referans rotorun dönme hızının bir katsayısı olarak girilebilir. Örneğin 200 rpm hızda dönen bir rotor modellenmek isteniyorsa ve referans rotor 100 rpm hızda dönüyorsa, modellemek istenen rotorun hız kısmına 2 yazılması yeterli olacaktır. [2]
Şekil 11. Stabil ve Stabil Olmayan Yörünge Grafikleri
6. SONUÇ
Geleneksel olarak, şirketler dönen bileşenli yapıların analizlerini yapmak için özel kodlar ve doğrudan matrisler üzerinden çalışmaya olanak tanıyan özelleştirilmiş Doğrudan Matris Soyutlama Programı (DMAP – Direct Matrix Abstraction Program) çözümleri kullanmışlardır. MSC Nastran’daki rotordinamik bazlı yetenekler, döner yapıları analiz etmek için kolay kullanımlı standart bir yöntem sağlar. Bahsedilen rotordinamik analizi yetenekleri, standart MSC Nastran çözüm sıralamalarına katılmıştır ve senaryo komutları ve toplu veri girdileri kullanılarak çağrılır. Bu standartlaştırma, model verilerinin aktarımını kolaylaştırmaktadır.
Rotordinamik yeteneklerinin arasında, analizlerde birden fazla rotorun katılabilmesi bulunmaktadır. Rotorlar farklı hızlarda dönebilir ve rastgele açılarda sıralanabilir. MSC Nastran rotordinamik analizleri, 1B elemanlar, eksenel harmonik elemanlar ve 3B katı ve kabuk elemanları kullanarak sabit ve dönen referans sistemlerinde analiz yapmayı desteklemektedir. Modeldeki karmaşıklık ve gereklilikler temelinde, kullanıcı uygun modelleme tekniklerini seçebilir. Bu yazıda sözü edilen rotordinamik olgusunun, ürünlere dökülmeden önceki fazlarında, tüm girdiler ve isterler, üstün rotordinamik çözümleriyle bu ürünlere ışık tutan MSC NASTRAN platformunda farklı ve kullanıcı tanımlı yaklaşımlar ve yöntemler ile simüle edilebilmektedir.
Cem Web Ofset A.Ş. Alınteri Blv. No. 29 Ostim - Ankara Tel: +90 312 385 37 27
Basım Tarihi: 1 Kasım 2024
Baskı Sayısı: 15.000
TMMOB Makina Mühendisleri Odası yayın organı olan ve 1957 yılından itibaren yayımlanan (iki farklı isimle yayımlanmıştır.) Mühendis ve Makina dergisi, 2017 yılından itibaren Mühendis ve Makina Güncel ismiyle Makina Mühendisleri Odası üyelerine gönderilmektedir. Dergimizle ilgili detaylı bilgi almak için www.mmo.org.tr genel ağ adresinden yararlanabilirsiniz. Ayrıca telefon, faks veya e-posta yoluyla da bize ulaşabilirsiniz.